 R i d o l f a . eu
R i d o l f a . eu
LaserPeng
Published February 2024 in None
Update der Version von 2022-12-08 LaserPeng besteht aus einem Laserpointer-Gewehr und einer elektronischen „Zielscheibe“. Es lassen sich verschiedenste Schießprogramme im Browser (Smartphone, PC) einstellen, um die eigene Reaktionsgeschwindigkeit und Zielgenauigkeit zu testen. Ein Holzgewehr, 3D-Druckteile, ESP8266 und Mircopython sind die Zutaten. Das Projekt ist noch in der Entwicklung.
 |
 |
Die Grundidee, ein Laserpointer-Gewehr zu bauen und mit einem kurzzeitigen Impuls einen lichtempfindlichen Sensor zu treffen, erweiterte sich im Laufe der Zeit erheblich. Letztendlich ist daraus ein Projekt mit verschiedenen Spielvarianten und einer Messung der Reaktionsgeschwindigkeit geworden.
Ein typischer Spielablauf
sieht wie folgt aus:
Man verbindet ein Endgerät wie Smartphone oder PC mit dem WLAN des Microcontrollers und wählt im Web-Browser eine Spielvariante aus. Im einfachsten Fall muss ein zufällig ausgewähltes Ziel getroffen werden. Per Endgerät wird das Spiel aktiviert und man hat x Sekunden Zeit, mit beliebig vielen Schüssen das Startziel Z zu treffen. Sobald Z getroffen wurde, leuchtet ein zufällig ausgewähltes Ziel A,B,C oder D auf und die Reaktionszeitmessung läuft. Innerhalb einer definierten Zeit sollte das leuchtende Ziel getroffen sein. Die Reaktionszeitmessung wird gestoppt und das Ergebnis auf dem Endgerät angezeigt.
Das Ziel
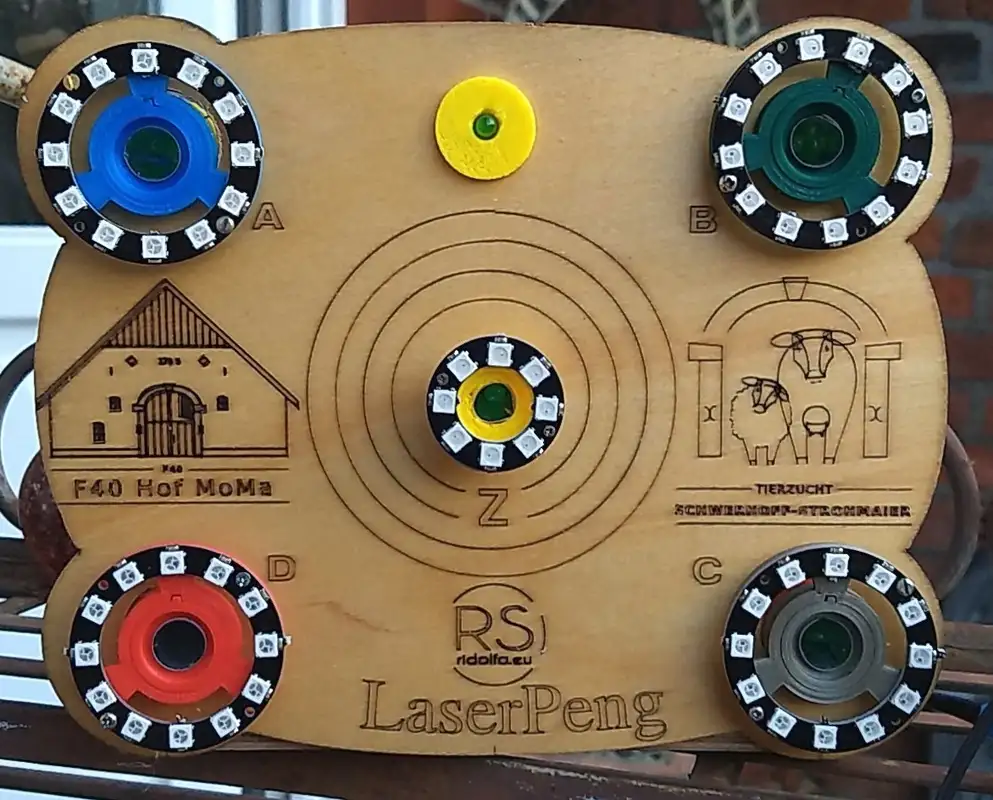
Die "Zielscheibe" besteht aus den vier Zielringen A,B,C und D, einem kleineren Startzielring Z und einem Umgebungslichtsensor. Alles ist eingebaut in eine lasergeschnittene und -gravierte, 3mm dicke Sperrholzplatte. Jede Zieleinheit enthält im Inneren eine grüne Diode als Sensor und einen äußeren Neopixelring für die Anzeige. Das "Auge" hat einen Durchmesser von 1cm, der Kanal läuft dann konisch auf die Diode zu. Zusätzlich ist im Inneren eine Reflexionsfolie angebracht, die dafür sorgt, dass auch Treffer aus einem Winkel von 10 bis 15 Grad vom Sensor erkannt werden. Die Zieleinheiten bestehen aus 3D gedruckten Teilen und sind demontierbar. Da jede LED der Neopixelringe einzeln in Farbe und Helligkeit steuerbar ist, lassen sich Spielideen mit beliebigen Kombinationen je Ring oder mit allen Ringen verwirklichen.
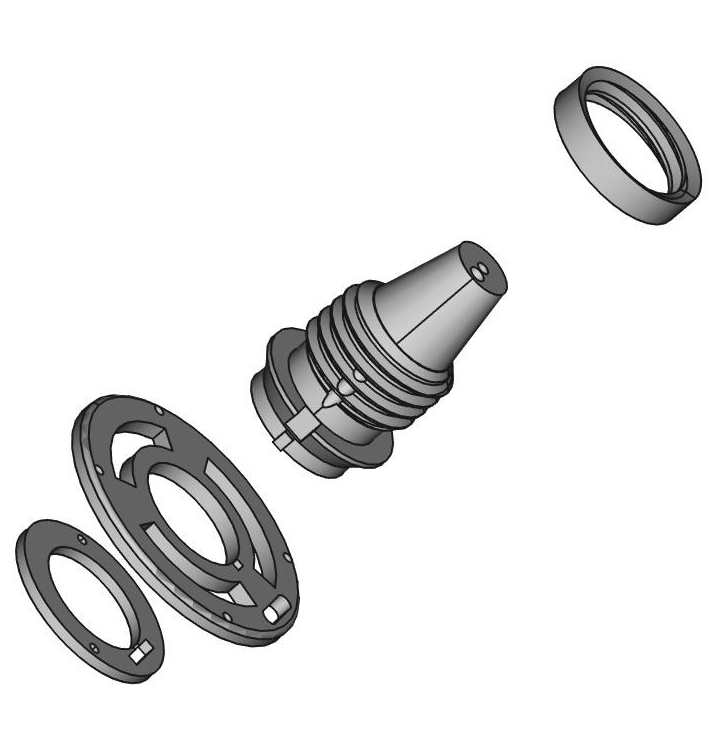 3D Teile 3D Teile |
| "Zielscheibe", Vorderansicht |
Ausgeschnitten und graviert wurde das Sperrholz-Vorderteil mit einem SculpfunS9 und der Software Laserweb4 . Die Zeichnungen sind mit Inkscape erstellt worden.
Der Laser
Der Laser ist ein handelsüblicher grüner Laserpointer. Die Anschlüsse des Ein-/Austasters wurden herausgeführt und werden vom Gewehrabzug betätigt.
Das Gewehr
Das Gewehr ist aus Fichtenholz "geschnitzt" und das Aluminiumrohr als Gewehrlauf hat einen für die Laserpointer Aufnahme passenden Durchmesser. Vorn und hinten ist kleiner Streifen leicht eingesägt und hochgebogen, so entstehen Kimme und Korn. Aktuell wird ein einfacher Drucktaster als Abzug verwendet. Der endgültige Abzug muss noch für die Laserpointerbetätigung ertüchtigt und in das Gewehr eingebracht werden. Der entsprechende Hohlraum fehlt noch. Vermeiden möchte ich eine zusätzliche Elektronik im Gewehrschaft, um die Einzelschussabgabe zu ermöglichen. Es fehlt allerdings noch eine Lösungsidee.
| Gewehr |
 Laserpointer Laserpointer |
 Abzug, komplett Abzug, komplett |
 Abzug, 3D Teile Abzug, 3D Teile |
 Abzug und Drucktaster Abzug und Drucktaster |
Die Elektronik
Die Schaltung ist auf einer Rasterplatine aufgebaut. Wesentliche Bausteine sind ein ESP8266 D1 mini Microkontroller und zwei TCL374 4fach Differrential-Vergleicher. Die Zieldioden werden als Fotodioden betrieben. Bei einem Treffer vergleicht der TCL374 die Diodenspannung mit einer einstellbaren Vergleichsspannung an seinen Differntialeingängen und zieht den Ausgang auf LOW. Die Zieleinheiten sind über einen Stecker mit der Platine verbunden. Aktuell wird die Vergleichsspannung mit einem Poti eingestellt. Geprüft wird noch, ob eine zusätzliche Fotodiode das Umgebungslicht erfassen und zur Regelung der Vergleichsspannung dienen kann. Alle Neopixel-Ringe sind in Reihe geschaltet und per I2C Bus vom Controller gesteuert.
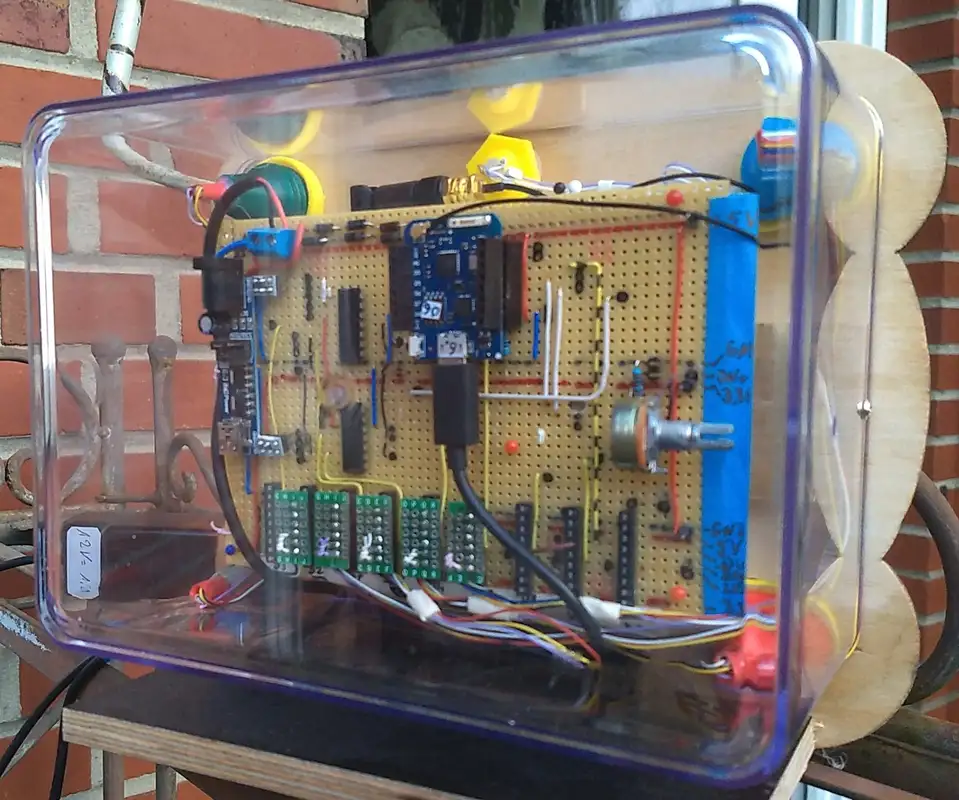 Seitenansicht Seitenansicht |
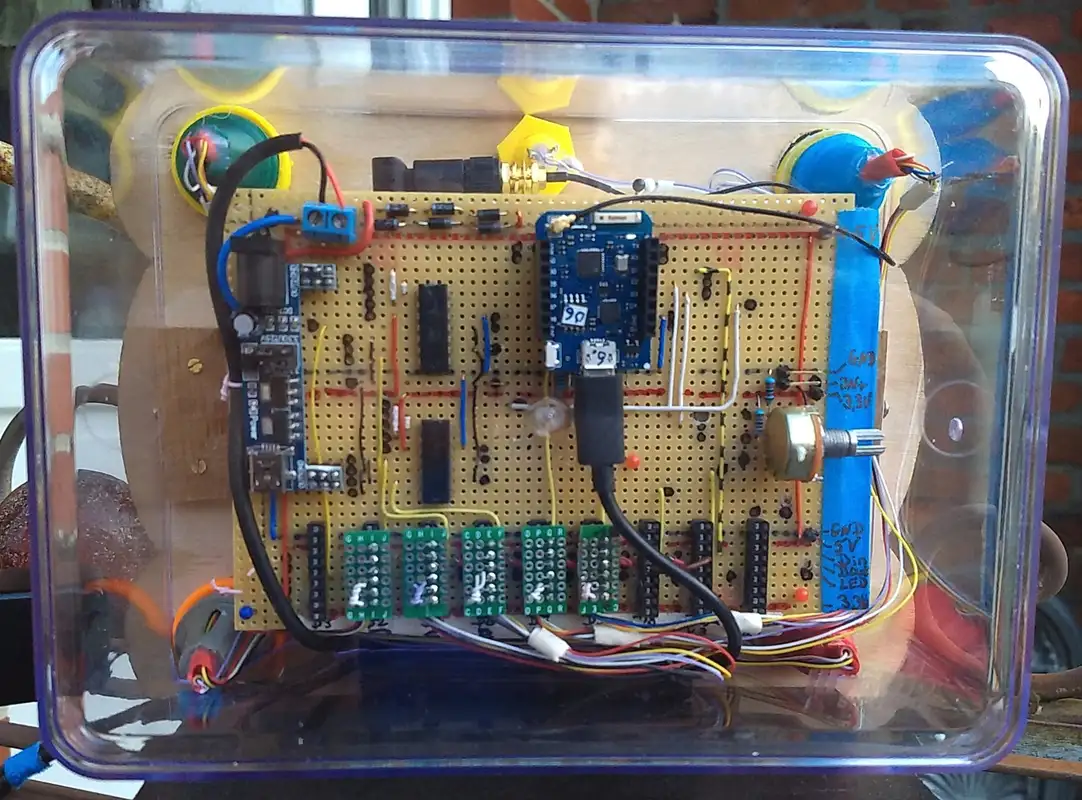 Rückansicht, Platine Rückansicht, Platine |
Das Programm
Das Programm ist in Micropython geschrieben für den ESP Controller. Zum einen wird damit die Hardware gesteuert, zum anderen ein Webserver aufgesetzt mit dem sich das Endgerät verbinden kann. Wie bereits erwähnt ist das ganze Projekt noch in der Entwicklung, dies trifft insbesondere für das Programm zu. Der Softwaredownload ist daher nur eine Momentaufnahme. Keine Dokumentation, überflüssiger Code, wenig optimiert, ...aber funktionsfähig.